【受付時間】 10:00〜18:00(土日祝日を除く)
IMU タクティカルグレードに関するFAQ | 株式会社ナノシード

【受付時間】 10:00〜18:00
(土日祝日を除く)
よくあるご質問
IMU vs AHRS vs INS 慣性測定ユニット → 姿勢機首方位参照システム → 慣性航法装置
-
自分のGPSシステムを持っています。生のモーションデータだけが欲しいのですが、どのセンサーが良いですか?ご自分のフィルタが配置されていて、モーションを測定するために生のデータが必要なのであれば、IMUが最適です。IMUは、温度、3次元加速度(加速度計)、3次元磁場(磁気探知機)、および3次元旋回速度に関する、生の補正データを提供します。
-
姿勢(ロール、ピッチ、ヨーイング)と機首方位のデータが得られるセンサーはどれですか?AHRSセンサーは、IMUに追加する、ロール、ピッチ、ヨーイングに関するすべてのデータを提供します。このセンサーは、IMUからの生データと地球の重力を融合するアルゴリズムを用いて方位を提供し、ロボットアームあるいは室内掃除ロボット最適です。
-
地理的位置データが必要です。どのセンサーにGPSが搭載されていますか?もしAHRSセンサーでは不十分な場合、AHRSを一つ以上のGPSセンサーと組み合わせることで必要な地理的位置データを得ることができます。AHRSと同様に、センサーやセンサー融合は、それぞれのセンサーからのすべてのデータを組み合わせて、より正確で全体的な車両の状態を把握できるようになります。
-
始めるために必要なものは何ですか?なんらかの開発キットで始めることを推奨します。当社の開発キットは、テストと統合を単純化するために必要なすべてのコンポーネント(自身で選択したセンサー、接続に必要なケーブルとアンテナ、ファームウェアとソフトウェア、3~5時間のInertial Sense技術者チームによる包括的技術サポート)を含んでいます。
さらに、Inertial Senseはお客様に、EvalToolと呼ばれるカスタムのデータロガーを提供します。データロガーは新しいセンサーのテストを容易にし、また、センサー統合時のトラブルへの対処には不可欠なものです。
GPSに関する考察
-
GPSデータが必要です。何を購入する必要がありますか?完全なGPS機能に関しては、INSキットの一つがお勧めです。IMUおよびAHRSキットはそれぞれアンテナを含みますが、GPSの統合は制限され、単純なタイムスタンプのみでの使用を意図しています。
-
INSはGPSなしでも位置を推定できますか?いいえ、できません。GPSは、初期の位置推測を提供し、IMUのバイアス推測を助けるために必要です。INSは、短時間であれば位置推測(GPSを使わずに位置を推定すること)が可能です。しかし、位置推測の品質はIMUのバイアス推定に依存し、GPSがINSを補助することで改善されます。
-
INSはGPS信号を失ってからどのくらいの間正確ですか?INSの慣性ナビゲーションは、GPS更新の間とGPS停止中の短時間、IMUデータを統合して位置推定と速度の推定を行います。推定位置は、位置と速度のドリフトを抑制するために、GPSが停止した5秒後に無効化されます。推測航法中の位置ドリフトの量は、システムのランタイム、経験した動き、バイアスの安定性など、いくつかの要因に基づいて変化する可能性があります。
-
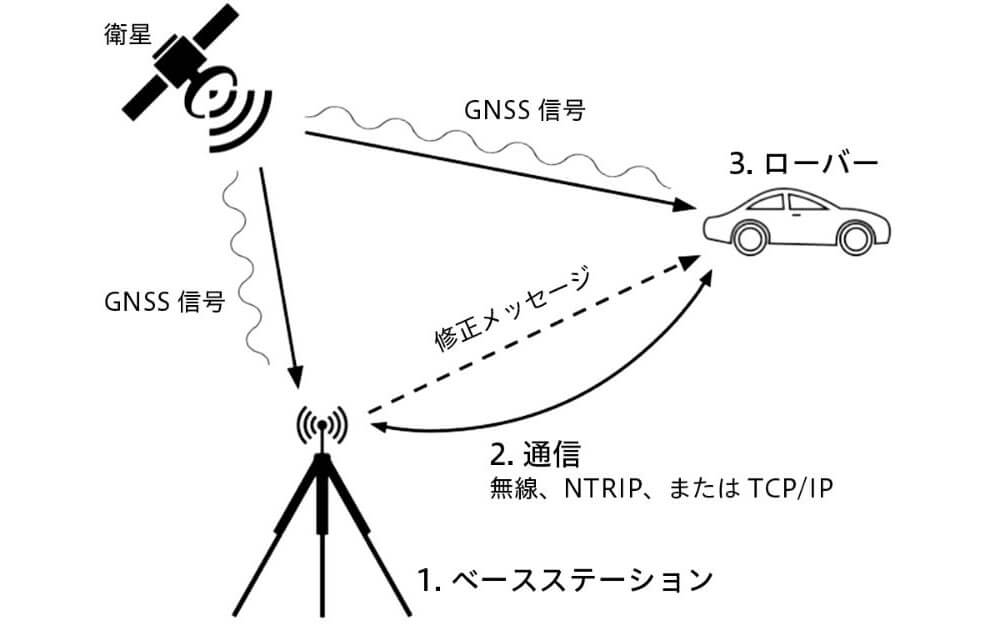
RTKとは何ですか?どのように動作しますか?RTK、あるいはリアルタイム運動学はGPS信号の精度を向上させるため使用される技術です。固定された基地局から、移動する受信機へ無線で補正情報を送ります。これらの訂正を活用することにより、GPSは1~3センチ精度でアンテナ位置を確定できます。
-
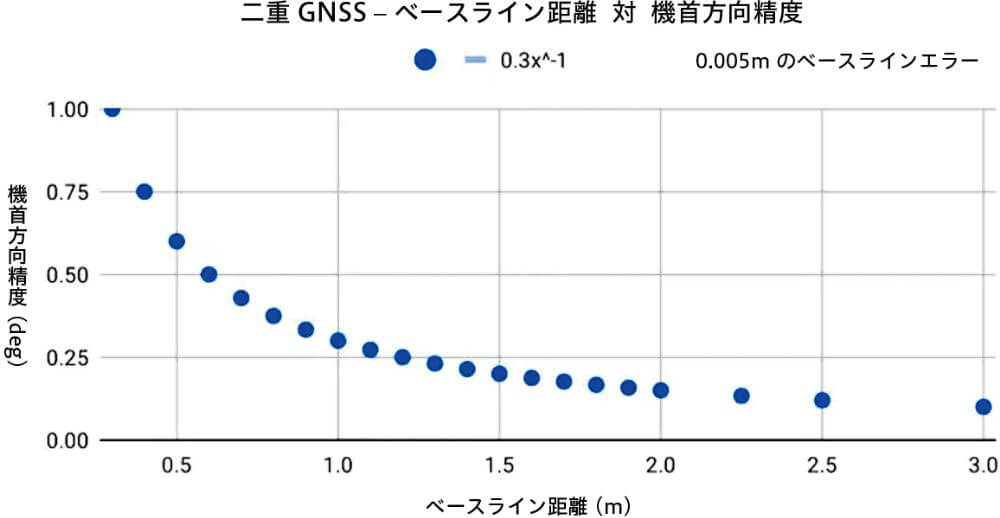
デュアルコンパスとは何ですか?2本のGPSアンテナを基線上に配置し、磁気センサーとジャイロに依存することなく、GPSによる正確で信頼性の高い方位を提供する構成です。
-
INSはデュアルコンパスとRTKを同時に使用していますか?現在、当社の二重コンパスINSは、ファームウェア内のRTKと二重コンパスを切り替えることで、いずれか一方を実行できます。ロードマップでは、来年度中にRTKと二重コンパスの同時使用を実現する意向が示されています。
要素と耐久性
-
ユニットのIP等級は何ですか?IP40です。
-
ユニットは防水ですか?IP40という等級に基づくと、ユニットは防水ではありません。アルミニウムの外装ですが、防水機能を付与するには追加の手段をとる必要があります。
-
INSは水面下でも動作しますか?INSは短時間であれば推測位置を実行できます。一般的にINSは、位置と速度データを提供するためにGPSを必要とします。GPSアンテナは、GPSを適切に機能させるために、水面上に設置する必要があります。GPSアンテナは、2m/sまた0.8m/s以上の高速移動時に精度を維持するために、INS(IMU)モジュールに対して固定されていることが理想です。GPSアンテナが水面に浮き、INSが水面下にある場合、GPSアンテナはINSの上に固定されることがあります。システムの位置はGPSアンテナ位置を反映し、そして姿勢(ロール、ピッチ、機首方位)はINSモジュールの方向を反映します。
-
「頑丈さ」が必要かどうか、どうすれば判断できますか?もしそれをオートパイロット、採鉱、電力線、その他の屋外や過酷なアプリケーションに使用する場合は、頑丈なものをお勧めします。当社の頑丈なフォームファクタは、過酷な環境下での使用において、センサーを保護するためのアルミニウムケーシングを提供します。
技術仕様と統合
-
PPKをサポートしていますか?ポストプロセシングキネマティック(PPK)に必要な生データは提供できますが、PPKソフトウェアは現在提供していません。将来的にこの機能拡張を希望する場合は、ぜひお知らせください。
-
走行距離計測入力を支援するユニットはありますか?この機能拡張はロードマップでは1年先に予定されています。
-
Pixhawkと統合しますか?Pixhawkへの生データは提供しますが、直接的に統合はしません。GPSデータのみをPixhawkに渡すことができます。
-
振動はナビゲーション精度にどのように影響しますか?INSの精度は加速3gを超える機械的振動により劣化する可能性があります。経験的なデータでは、約100~150Hzで劣化することがわかっています。本製品が受ける振動を低減し、精度を向上させるためには、マウントに防振材を追加することが必要な場合があります。
その他
-
GNSS&INSとは何ですか?GNSSとINSは自動車やロボットなどのナビゲーションセンサーを表す用語です。GNSSとは全地球測位システム(Global Navigation Satellite Systemの略)であり、全地球的な座標を提供するいくつかの衛星システムから構成されています。INSとは、慣性ナビゲーションシステム(Inertial Navigation Systemsの略)のことで、姿勢、方位、速度、加速度などの位置・姿勢に関するデータを提供するシステム全般を指します。GNSS INSセンサーは、GNSS(またはGPS)情報を受信し、より正確な位置および方向データを提供する慣性センサーです。
お客様用ご相談/お問い合わせ
製品に関するご相談、デモ機器、お見積・納期などに関して お気軽に問い合わせ下さい
※は入力必須項目となります。
INFORMATIONお知らせ
-
2026.03.23
新製品
-
2025.11.12
新製品
-
2025.07.01
新製品
-
2025.03.31
お知らせ
-
2024.12.26
新製品