【受付時間】 10:00〜18:00(土日祝日を除く)
デプスカメラ Ruby 小型&高速 ロボットハンドに搭載可能 | 株式会社ナノシード

【受付時間】 10:00〜18:00
(土日祝日を除く)

デプスカメラ Ruby
アクティブステレオ方式


3Dカメラは、各種方式があり、また用途も同様に多用です。構造化光カメラは、精度が要求されるものの、高いフレームレートや色情報が必要でない場合に適したソリューションです。一方、ステレオビジョンは、屋外や長い距離の測定に適していますが、テクスチャのない表面の測定には困難が伴います。
今回開発したRuby デプスカメラは、前述の3Dビジョン技術であるステレオビジョンと構造化光の長所を併せ持つカメラです。Rubyには3つのイメージセンサーが搭載されており、2つのモノクロセンサーはデプス認識用、もう1つのカラーセンサーは色情報認識用です。さらに、赤外線パターンプロジェクターが内蔵されており、深度認識を向上させますが、カラーセンサーからは見えません。このように、Ruby デプスカメラは、柔軟な3Dビジョンソリューションの1つです。

本ページの構成
各種カタログ及び製品資料
1.特長
レーザーパターンプロジェクター内臓モノクロステレオカメラ及びカラーカメラ
- 画角:62°
- 最大視差範囲:256 pixels
- 最大フレームレート:60 fps
- 最大画素数:1440 × 1056(1.5 MP)
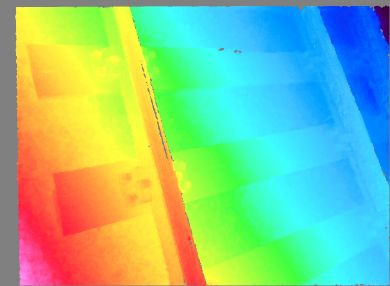
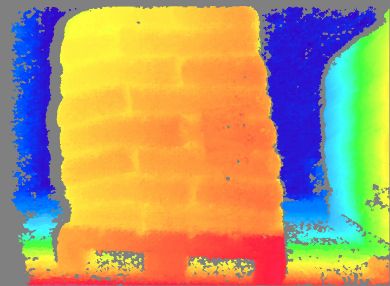
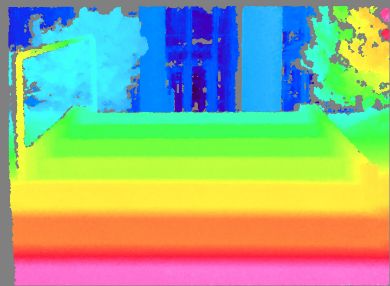
2.視差画像とポイントクラウドデータ
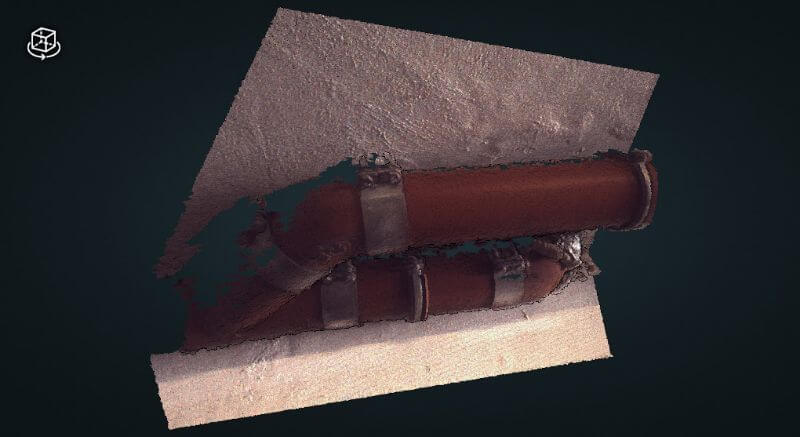
上の画像をクリックするとサンプルのポイントクラウドを見ることができます。



3.用途
農業用ロボット
農作物の土壌の状態や生育状況を確認するためには、3次元の深度情報を確実に検出し、さらに色情報を出力することが不可欠です。
建設オートメーション
Ruby デプスカメラは、IMUと暗い場所や明るい場所に対する堅牢性により、建設現場(ナビゲーション、マッピング、障害物検知)のアプリケーションに最適な補完機能を提供します。
屋外
ステレオビジョンは、そのパッシブな動作モードにより、日中の光に対して堅牢です。そのため、Ruby 3D深度カメラは、明るい日光の下でも、屋外で最適に使用することができます。
屋内
レーザーパターンプロジェクターが内蔵されているため、真っ白な壁や質感のない表面でも問題なく使用できます。このプロジェクターを使用すれば、屋内用マシンビジョンアプリケーションを簡単に実装することができます。
ビンピッキング
レーザーパターンプロジェクターを内蔵しているため、難しい材料やバルク材も簡単に検出することができます。Ruby は、さまざまなビンピッキングアプリケーションに理想的です。
AMR
物流などのモバイルロボットアプリケーションをスムーズに動かすには、しっかりとした3Dの障害物や経路の検出が重要です。Ruby は、自律走行車やロボットを制御するための信頼性の高い 3D 深度データを提供します。
4.仕様
ハードウェア仕様
| イメージセンサー | IMX296 |
|---|---|
| 彩度 | カラー及びモノクロ |
| 最大解像度 | 1440 × 1056(1.5 MP) |
| IMU | BNO085 |
| IMUサンプリング周波数 | 400 Hz |
| 電源 | 11.2 – 30 V DC |
| 消費電力 | 9W |
|---|---|
| 寸法 | 130 × 92.5 × 34.5 mm |
| 重量 | 450g |
| インターフェース | Gigabit Ethernet, GPIO |
| 動作温度 | 0 – 45 °C |
| 規格 | CE, UKCA, FCC, RoHS, レーザークラス 1 |
ステレオマッチング
| 出力画像 | Mono8、Mono12、RGB8 |
|---|---|
| ステレオアルゴリズム | SGM(Matching Global-Semi) セミグローバルマッチング |
| 最大画素 | 1456 x 1088 pixels |
| 視差範囲 | 64~256 pixels (16pixel幅) |
| 最大フレームレート(fps) | 60fps |
|---|---|
| サブピクセル解像度 | 4 bit (1/16 pixel) |
| 後処理 | ギャップ補間、 ノイズ除去及び低減 |
画素数と速度
※表は横にスクロールできます
5.対応プラットフォームと規格
多くの互換性により、さらなる画像処理のための豊富な選択肢を提供します。もちろん、お客様独自のソフトウェアを開発することも可能です。




6.動画
3Dカメラ , ステレオカメラ 関連商品のご紹介





お客様用ご相談/お問い合わせ
製品に関するご相談、デモ機器、お見積・納期などに関して お気軽に問い合わせ下さい
※は入力必須項目となります。













INFORMATIONお知らせ
-
2025.11.12
新製品
-
2025.07.01
新製品
-
2025.03.31
お知らせ
-
2024.12.26
新製品
-
2024.08.19
新製品