【受付時間】 10:00〜18:00(土日祝日を除く)
柔らかくて伸びる触覚センサ「Plyon Stretch」の実力とは? | 株式会社ナノシード

【受付時間】 10:00〜18:00
(土日祝日を除く)
1. 伸縮できる触覚センサは何が嬉しい?
何らかの用途で触覚を計測したい場合、主に2つのパターンが考えられます。
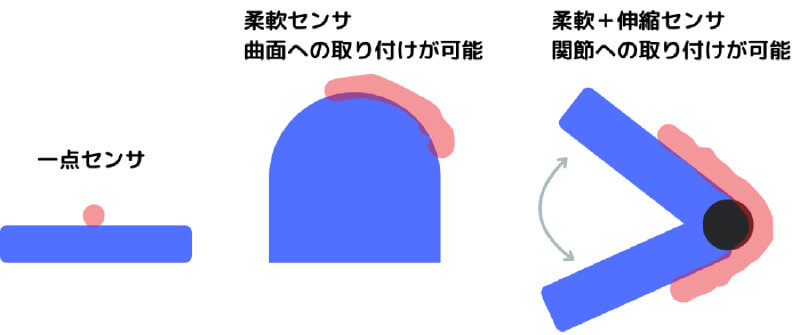
- 決まった一点の接触を計測したい場合
- 面上のどこかでの接触を計測したい場合
前者はロボットのグリッパのようなものに対して、グリッパ内で何か物体を持っているかどうかを判定するような場合になります。
後者はロボットの表面全面に対して、何かぶつかったり、当たったりしたのを検知したいときにロボット表面の全体で触覚を計測する必要がある場合です。
前者の場合では柔軟性や伸縮性は特に必要になりませんが、後者の場合、まずロボットの表面形状に合わせてセンサを取り付けられるという柔軟性が求められます。
それに加えて、ロボットは関節を動かすことで表面の形状が変わります。このような可動部を持つ物体に対しては、表面の動きに合わせてセンサ自体が伸縮性を持つことが必要になってきます。
これらのイメージを図にすると以下のようなになります。
2. 他の柔軟・伸縮可能な触覚センサ
ここではPlyon Stretch以外で柔軟性と伸縮性を持つ世の中の触覚センサを紹介します。
以下の2つが実際にプロダクトとして提供されている柔軟かつ伸縮可能な触覚センサになります。
- PPS社、伸縮自在タクトアレイ
○電気を通す繊維を用いたシート型の伸縮圧力センサです。シート上の圧力を分布で計測することができ、最大10%の伸縮に耐えることができます。 - Bobop Sensor社、Roboskin
○布製の触覚センサで、センサ本体が非常に薄いのが特徴です。伸縮性はあまり高くはなさそうですが、触覚の検出において非常に高い精度を持っています。
プロダクトとして提供されている柔軟かつ伸縮可能な触覚センサは非常に少なく、その中でPlyon Stetchは最大の伸縮率が20%と高い伸縮性を持つことが大きな特徴となっています。
3. Plyon Strechの特徴まとめ
これまでPlyon Stretchについて主に柔軟性と伸縮性について触れてきましたが、前回の記事でも書いたPlyonシリーズの特徴と合わせて、改めてPlyon Stretchの特徴をまとめたいと思います。
- 電気抵抗式と静電容量式の2つの方式を合わせた触覚センサであり、それによりドリフトを抑えたり、安定的なセンサ出力を得ることができます。
- 静電容量の仕組みを用いて、近接センサとしても使用することができます。
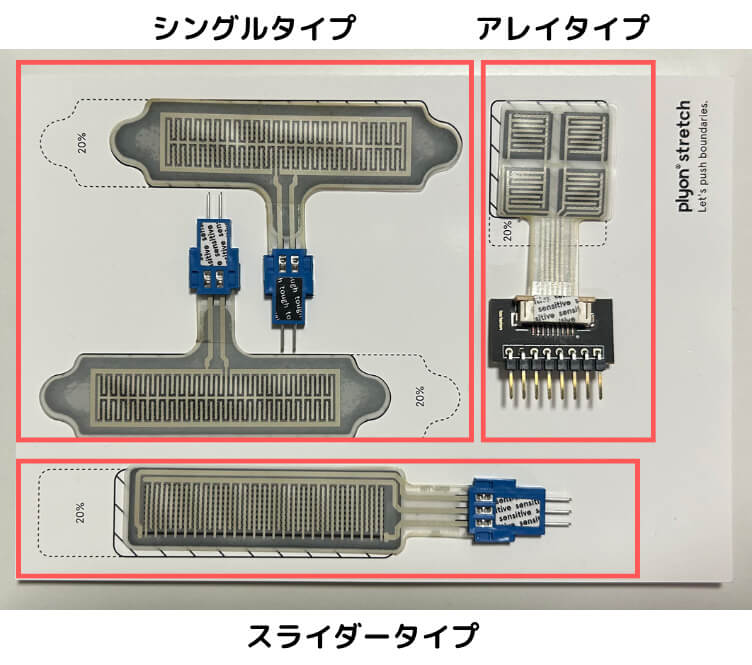
- センサにいくつかのタイプがあり用途に合わせて使い分けが可能です。
○シングルタイプ:センサが1つ搭載されたセンサです。
○アレイタイプ:センサが複数配列されているセンサです。複数配列されることで、接触した位置を検知することができます。
○スライダータイプ:滑りを検知するセンサです。 - センサ本体に柔軟性があり、曲面などを物体に貼り付けることができます。
- さらにPlyon Stretchではセンサ本体に伸縮性もあり、20%の伸縮に耐えることができます。
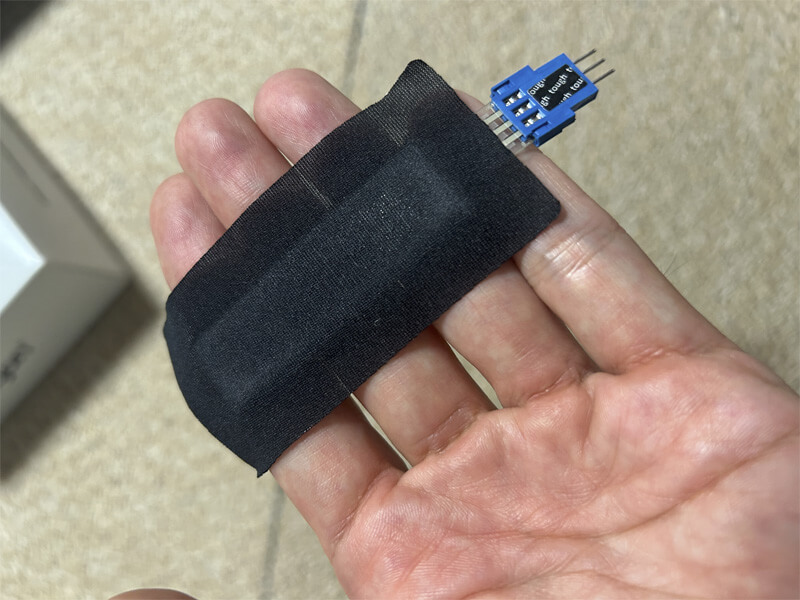
またアイロンなどを使用して熱を与えることで、以下の図のようにセンサ本体を直接、布などに取り付けることも可能です。
4. センサを使ってみる
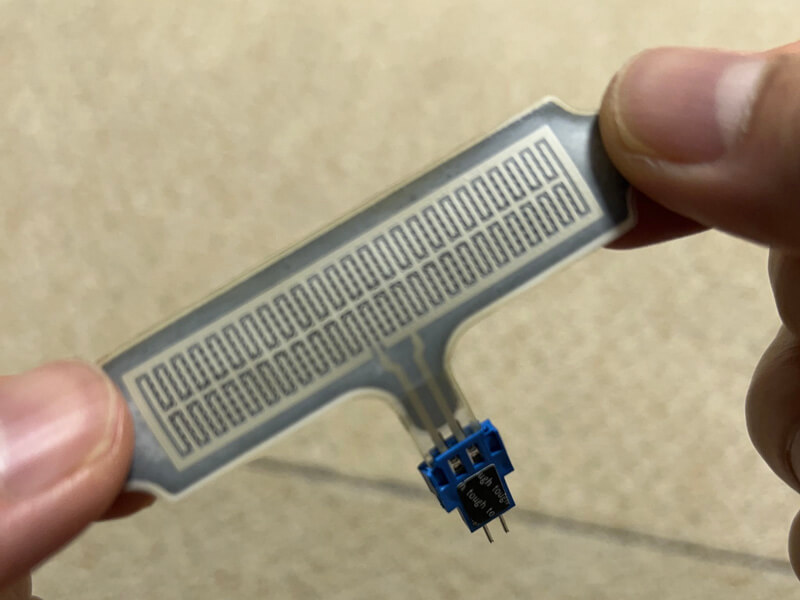
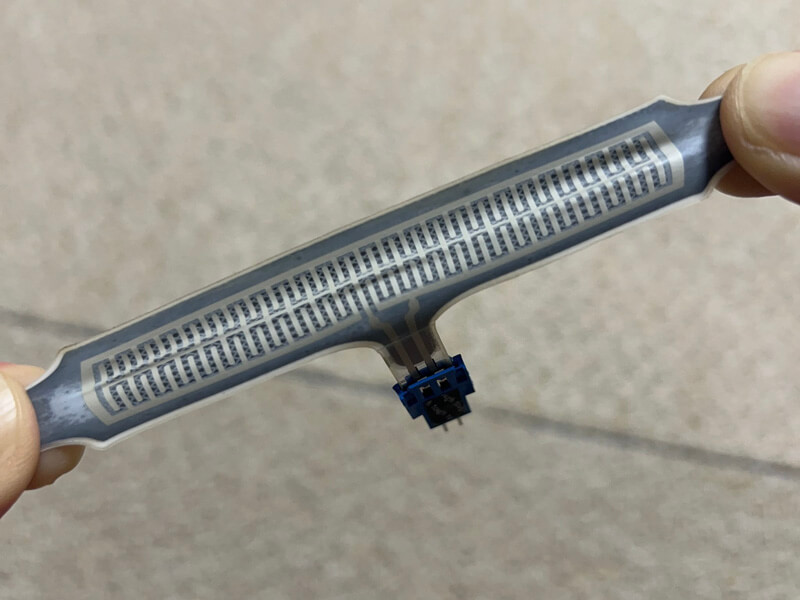
それでは実際にセンサを使って見たいと思うのですが、センサの出力を見る前に、実際の伸縮性がどんなものか見てみたいと思います。
以下のようにセンサの両端を持って伸ばしてみました。伸ばした状態を見るとかなり伸縮性が高いことが分かります。(センサは20%の伸縮が限界でそれ以上伸ばすと壊れる危険があります。伸ばしすぎないように注意してください。)
同様に布を取り付けた状態で伸縮させた様子の写真が以下になります。

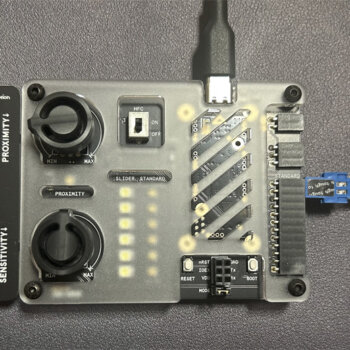
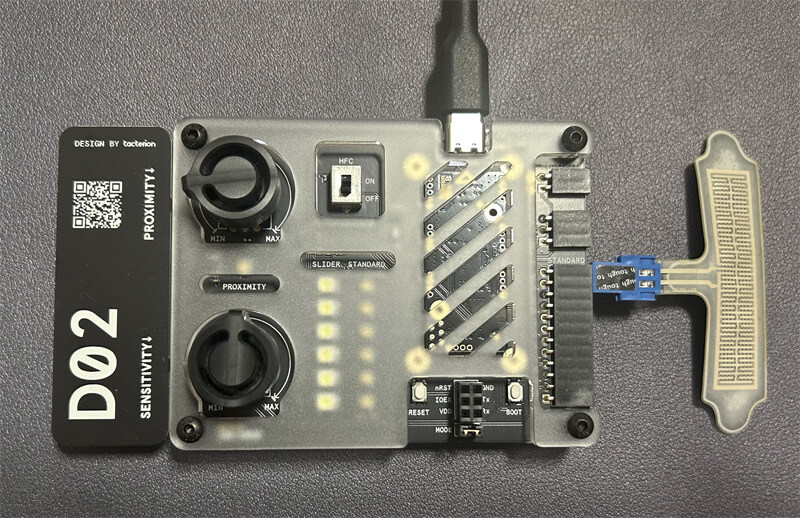
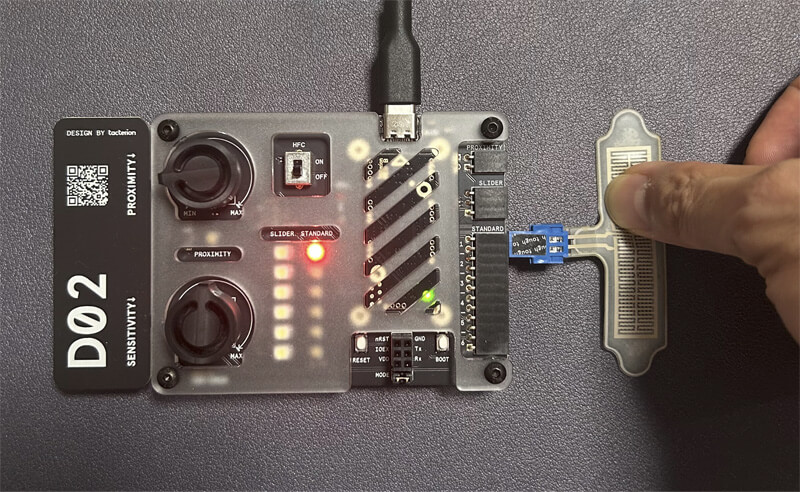
次にセンサの出力を見てみます。基本的な使い方はこれまでのPlyonセンサと同じになっており、
以下のように付属のセンサボードに接続し、計測を行うことができます。
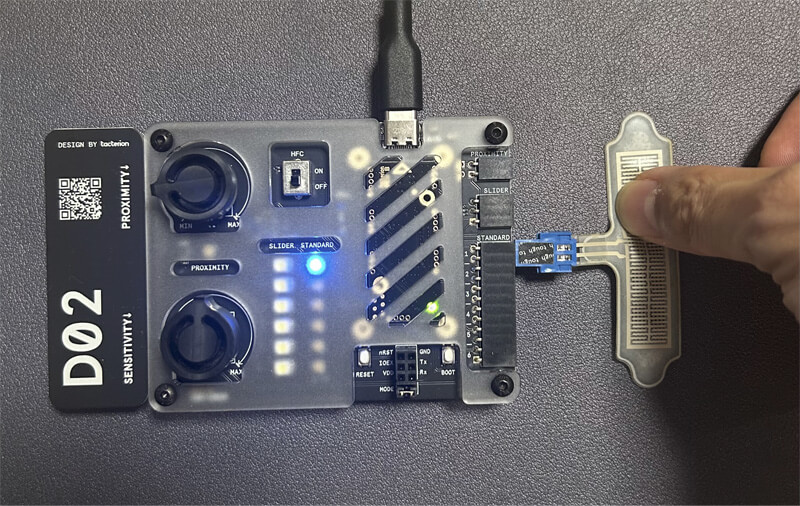
ボードに接続したセンサに指で触れるとボード上のLEDが青に点灯し、接触が検知できているのが分かります。また触れる力を強めていくとLEDの色が青から赤に変化し、力の大きさについても検出できていることが確認できます。
次に、センサ本体を伸ばした際にどのような挙動になるかを見てみたいと思います。
以下のようにセンサ本体の片方をクリップで固定し、もう片方を引っ張ってみます。
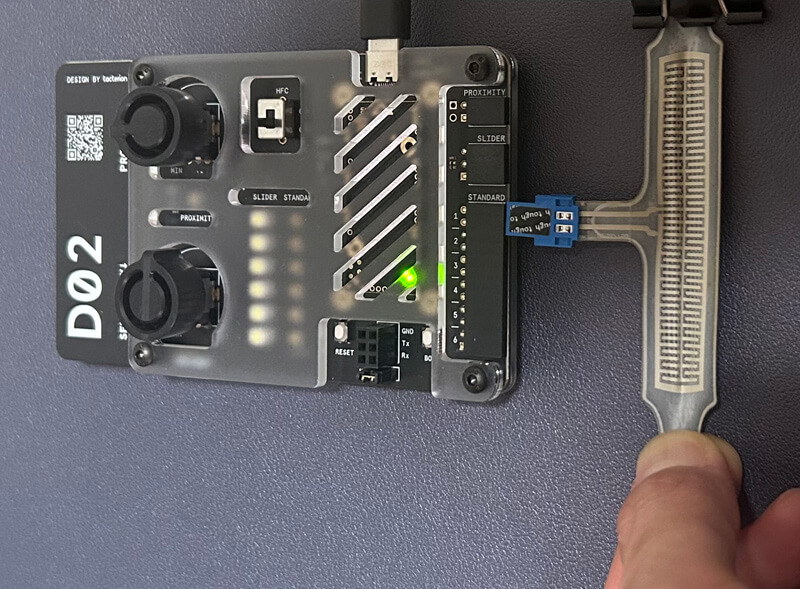
画像のようにセンサを伸ばしただけでは、触覚が検知されず、センサのLEDが光っていないのが分かります。
この状態でセンサ部分に接触すると、以下の画像のようにLEDが光り、触覚センサが反応しました。
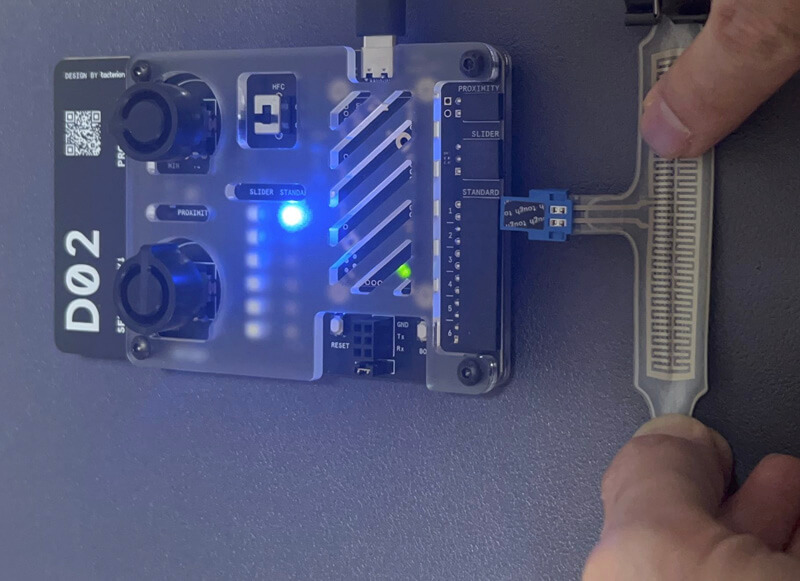
このようにPlyon Stretchは伸縮方向に力を発生させても触覚センサは反応せず、また、センサを伸ばした状態でもちゃんと触覚のみを検知できていることが分かります。
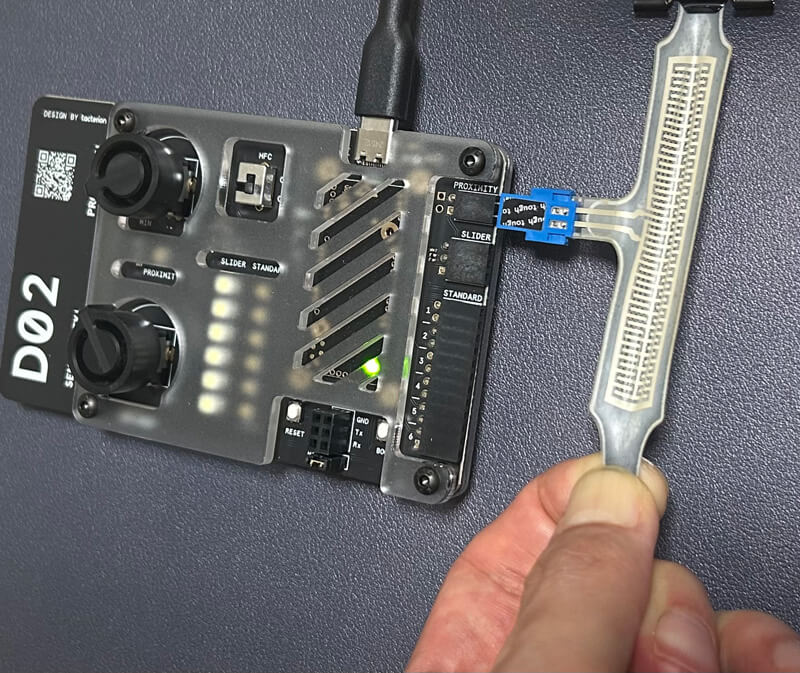
次に近接センサの出力も見てみます。
近接センサは以下のように指を近づけることで、ボードの左の白色のLEDが光ります。
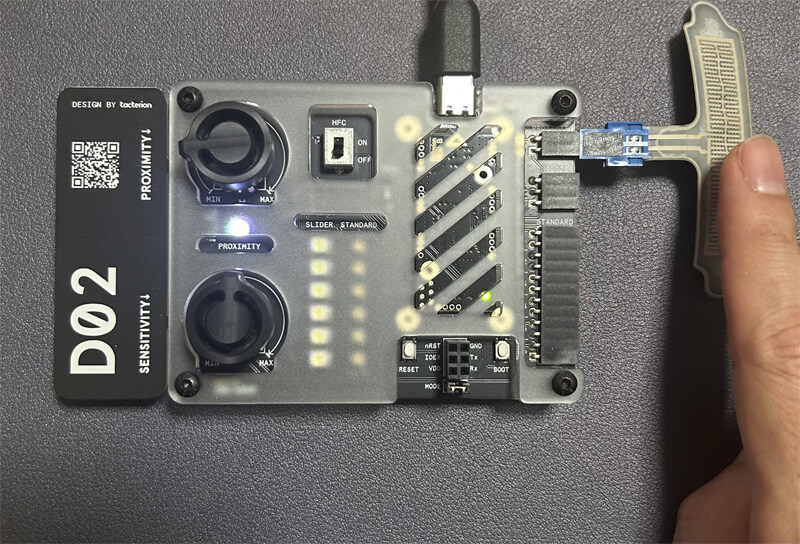
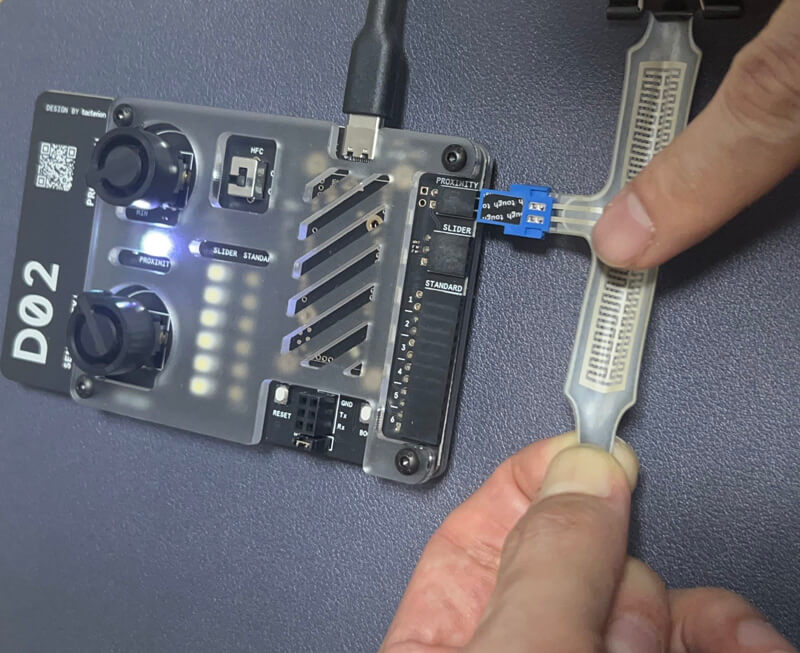
近接センサにおいてもセンサ本体を伸ばした状態での出力を見てみます。
以下の画像のようにセンサを伸ばす方向に力を加えても近接センサは反応せず、伸ばした状態でも正常に近接センサが動作していることが分かります。
5. まとめ
Pylonの新しいセンサ、Plyon Strechについて特徴を解説し、実際にその動作を確認してみました。
これまでのPlyonの安定した触覚の出力や柔軟性、近接センサとしても使えるといった特徴に合わせて、伸縮性を持つことで、直接的に人体や布のような伸縮性のある対象物に取り付けることが可能になりました。このような特徴からウェアラブルセンサや医療・福祉といった領域への応用が期待できます。
この記事を読んで、このセンサ面白いなと感じていただけた方はぜひ下記リンクよりお問い合わせ下さい。
最後までお読み頂きありがとうございました。
お客様用ご相談/お問い合わせ
製品に関するご相談、デモ機器、お見積・納期などに関して お気軽に問い合わせ下さい
※は入力必須項目となります。