【受付時間】 10:00〜18:00(土日祝日を除く)
建設機械の動作推定ソリューション | 株式会社ナノシード

【受付時間】 10:00〜18:00
(土日祝日を除く)

建設機械の動作推定
ソリューション

建設機械に搭載されたIMU(加速度計やジャイロセンサー)から得られる多様なデータを集約し、それをもとにリアルな建設機械の動作や状態を仮想空間上で忠実に再現します。さらに、AIなどの先端技術を活用した解析により、効率的かつ高精度なシミュレーションを実現することが可能です。
詳しくはお問い合わせください。よくあるご質問はこちらから。
本ページの構成
1. 概要
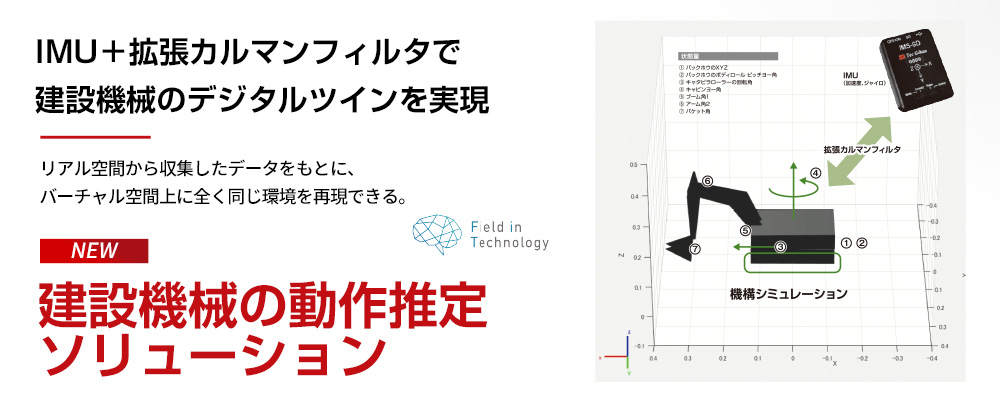
建設機械の動作推定ソリューション
本ソリューションは、IMU(加速度・ジャイロ)と拡張カルマンフィルタを組み合わせることで、建設機械の各部位の動作状態を高精度に推定するシステムです。
取得したデータをもとに、機構シミュレーションをリアルタイムで実行し、デジタルツインを実現します。
2. 特徴
GPS・レーザー不要で実現する建機動作のスマートな可視化を実現
- GPS不要・レーザー不要
- センサ後付け可能(既存機にも対応)
- 実機とデジタルツインの同期動作により、現場状況を正確に再現可能
3. しくみ(バックホー位置姿勢のデジタルツインシステム)
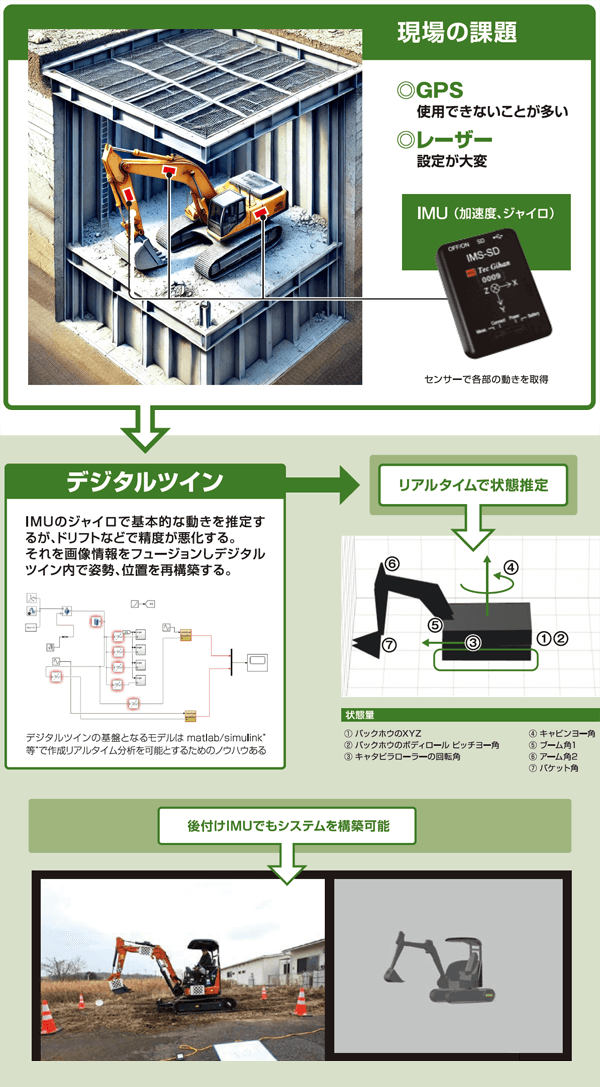
現場の課題
- GPS/地下や建物内などでは受信できない場合が多い
- レーザー/設置・調整に手間がかかる
本システムの構成
- IMU(加速度・ジャイロ)をバックホーに後付けすることで、加速度・角速度を取得
- 拡張カルマンフィルタなどを用いた信号処理により、各部の状態(位置・姿勢)をリアルタイムで推定
- 取得した状態情報をもとに、3D機構モデル上で動作を可視化
- MATLAB/Simulink等による動力学モデルを活用することで、リアルタイム制御・分析にも応用可能
推定対象の状態量
① バックホウのXYZ
② バックホウのボディロール ピッチヨー角
③ キャタピラローラーの回転角
④ キャビンヨー角
⑤ ブーム角1
⑥ アーム角2
⑦ バケット角
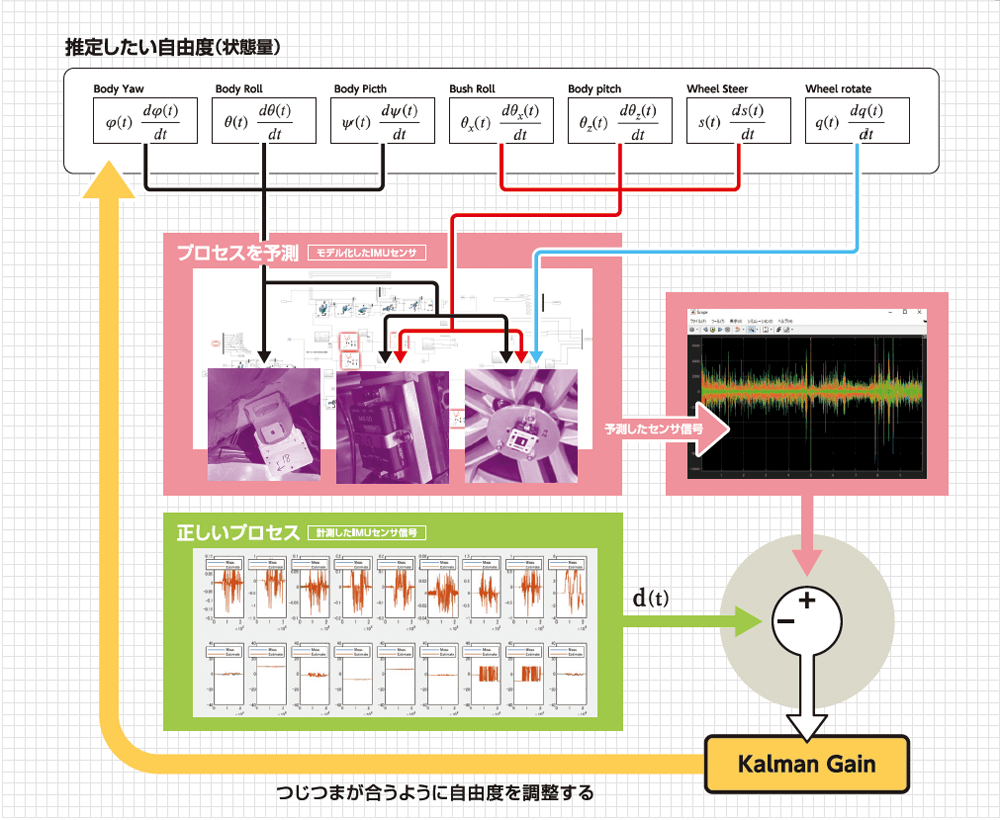
拡張カルマンフィルタについて
- 状態を数式でモデル化(たとえば「今の速度と角度から次の位置を予測」など)
- センサから観測された値と比較して、ズレ(誤差)を見つける
- そのズレを使って状態を修正(補正)する
これをリアルタイムに繰り返すことで、センサのノイズがあっても安定した推定ができます。
4. 事例
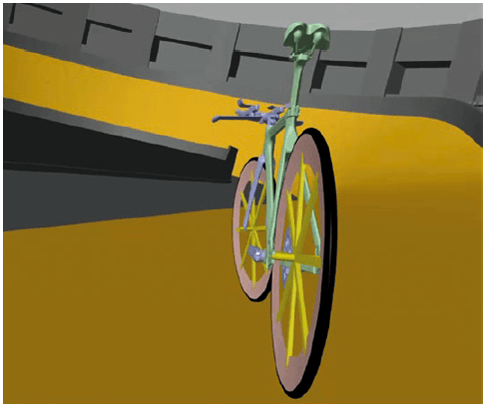
拡張カルマンフィルタ動作推定 競技用自転車 (屋内競輪場を走る自転車の動作推定)
【課題】
- 自転車は移動体である。
- ロールピッチヨーの3次元姿勢角の変化が大きい。
- 光学式モーションキャプチャではその行動範囲のすべてをとらえることはできない。
- 屋内競輪場は屋根があるためGPSの精度が悪い。
【ソリューション】
自転車に取り付けた小型IMU、さらにドリフトを抑えるために、コース上に取りつけた部分的なカメラ情報からカルマンフィルタを作成し、動作推定を実施。
5. 応用分野
- 他社製建設機械の動力学パラメータ推定
- 数値化した動作データを用いた、オペレータの技能分析
- 力センサデータの詳細分析
- 動作データからの逆動力学分析
- 最適動作シミュレーション(軌道最適化)
6. 受託実績
- IMUを用いたスポーツ選手のモーションキャプチャ構築
- 画像処理を用いた3次元モーションキャプチャ構築
- 数理最適化を用いた、スポーツ動作最適化アルゴリズム開発
- IMUを用いたサスペンション挙動の推定アルゴリズム開発
- 廉価版IMU計測システムの開発
- YOLO-Xを用いたスポーツビデオデータのデジタル化
- モーションキャプチャを含むスポーツ動作の多角的データの分析
- AWSを用いたモビリティデータ可視化システム構築




お客様用ご相談/お問い合わせ
製品に関するご相談、デモ機器、お見積・納期などに関して お気軽に問い合わせ下さい
※は入力必須項目となります。












INFORMATIONお知らせ
-
2026.03.23
新製品
-
2025.11.12
新製品
-
2025.07.01
新製品
-
2025.03.31
お知らせ
-
2024.12.26
新製品