【受付時間】 10:00〜18:00(土日祝日を除く)
精密な自律運転を実現するセンサーユニット「IMU(慣性計測ユニット)」とは? | 株式会社ナノシード

【受付時間】 10:00〜18:00
(土日祝日を除く)

自動車や農機、建設機械、ドローンなど、あらゆる移動体で自律運転技術が開発されています。そのような自律運転の実現に貢献しているのが、多様なセンサーを搭載した「IMU(慣性計測ユニット)」と呼ばれるセンサーユニットです。本記事では、IMUの概要や特長、主な用途例などをまとめて解説いたします。
IMU(慣性計測ユニット)とは?
「IMU(Inertial Measurement Unit)」は3次元の慣性運動を検出するセンサーユニットであり、日本語では「慣性計測ユニット」とも呼ばれます。一般的には、角速度センサー(ジャイロセンサー)3軸、加速度センサー3軸、温度センサーで構成されており、3次元での回転運動と直進運動を正確に計測することが可能です。
ジャイロセンサーと加速度センサーでは、それぞれ次のようなことを計測します。
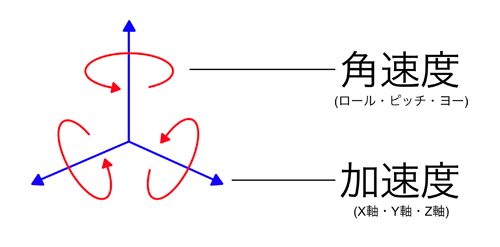
| ジャイロセンサー |
|
|---|---|
| 加速度センサー |
|
これらの計測結果を利用することで、3次元空間内で人やモノ・車両などがどのような運動状態なのかや、どのような姿勢をしているのかを推測できます。また、モノや車両の場合は、その情報を生かして姿勢制御や自律運転に応用することも可能です。
IMUの特長
IMUは搭載している各センサーから得た情報をCPUが処理する仕組みとなっています。運動するモノや車両は振動・衝撃・温度変化といったさまざまな影響を受けますが、CPUがそれらを考慮して計測結果に補正をかけることで、高精度かつ安定したセンシングが実現しているのです。
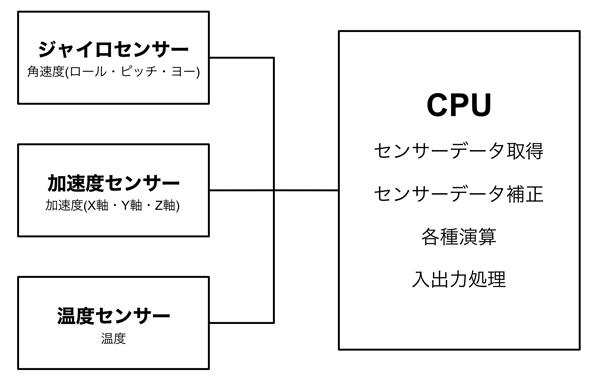
また、IMU製品によってはジャイロセンサー、加速度センサー、温度センサー以外に、磁気や気圧、高度を計測できるセンサーが組み込まれており、より多くの情報をまとめて計測できる場合もあります。
IMUの用途
では、実際にIMUはどのような用途で活用されているのでしょうか。代表的な用途を2つご紹介します。
姿勢制御
IMUではジャイロセンサーや加速度センサーの測定値からモノや車両が現在どのような姿勢をしているのかを推測できます。さらに、その結果にもとづいて対象物の姿勢維持や姿勢変更といった制御を行うことが可能です。
たとえば、最近のバイクにはIMUが搭載される例が増えており、急ブレーキ時などにタイヤのロックを防ぐABS(アンチロックブレーキシステム)の精度を向上させたり、坂道発進の安定性を向上させたりするのに役立っています。ほかにも、ロボットアームが指定された姿勢を維持するように制御したり、アンテナやジンバルカメラの振動を検知して安定化させたりするのにも、IMUが活用されています。
慣性航法装置
慣性航法(Inertial
Navigation)とは、移動する車両や船舶、航空機、ミサイル、ロボットなどに使用されている技術で、移動体の位置・速度・方向などを推測することができます。慣性航法を実現するためのシステムは慣性航法装置(Inertial
Navigation System=INS)と呼ばれており、GPSや高度計、磁気センサーなどをIMUと組み合わせる形で構成されています。
慣性航法装置では、GPSで得た既知の位置情報にIMUで計測した移動速度と方向を統合することで、現在位置を推定することが可能です。GPSのみでもおおまかな位置や動きは推定できますが、トンネル内や高架下のようにGPS信号が届かない場所や、アーバンキャニオンと呼ばれる構造物が密集したエリアでは精度が悪化するため、高精度に自己位置を推定するにはIMUが欠かせません。
慣性航法装置はドローンや自動運転車、スマート農業、スマート建機、ロボットなどの制御に活用されており、これらの移動体の自律運転を実現するためのキーパーツとして注目されています。
まとめ
今回は、3次元の慣性運動を検出するセンサーユニットである「IMU(慣性計測ユニット)」についてご紹介しました。自律運転の実現には欠かせない存在であり、今後ますます重要性が高まってくると考えられます。IMU自体も小型化や高性能化が進んでおり、対応可能な領域が広がっているため、引き続き注目していきたいところです。
位置情報技術入門: 用語集と重要ポイント
お客様用ご相談/お問い合わせ
製品に関するご相談、デモ機器、お見積・納期などに関して お気軽に問い合わせ下さい
※は入力必須項目となります。